本文共 977 字,大约阅读时间需要 3 分钟。
没错!Transformer的"魔爪"已经伸向3D目标检测了。
Pointformer:用于3D点云的特征学习backbone,可结合并提高现有的3D点云目标检测网络性能,如VoteNet、PointRCNN和CBGS等。
注:文末附【Transformer】和【3D目标检测】学习交流群
Transformer最近在3D点云方向应用的工作可以看一下:
Pointformer
3D Object Detection with Pointformer
- 作者单位:清华大学(黄高团队), 亚马逊Alexa AI等
- 论文:https://arxiv.org/abs/2012.11409
由于3D点云数据的不规则性,从点云进行3D目标检测的特征学习非常具有挑战性。
在本文中,我们提出了Pointformer,这是专为3D点云设计的Transformer backbone,可以有效地学习特征。
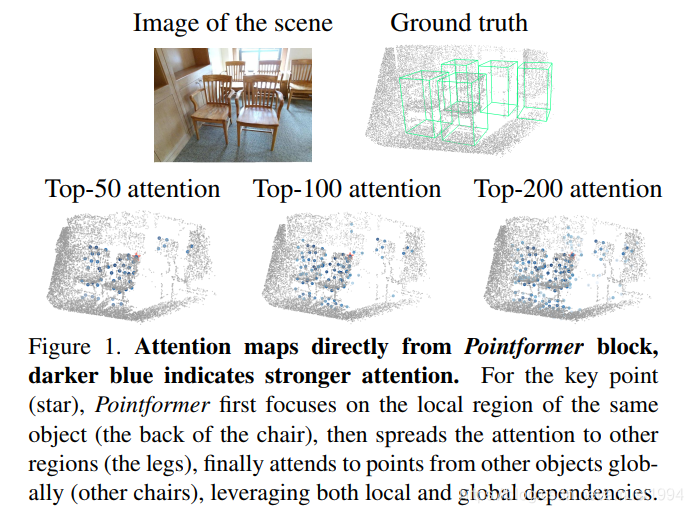
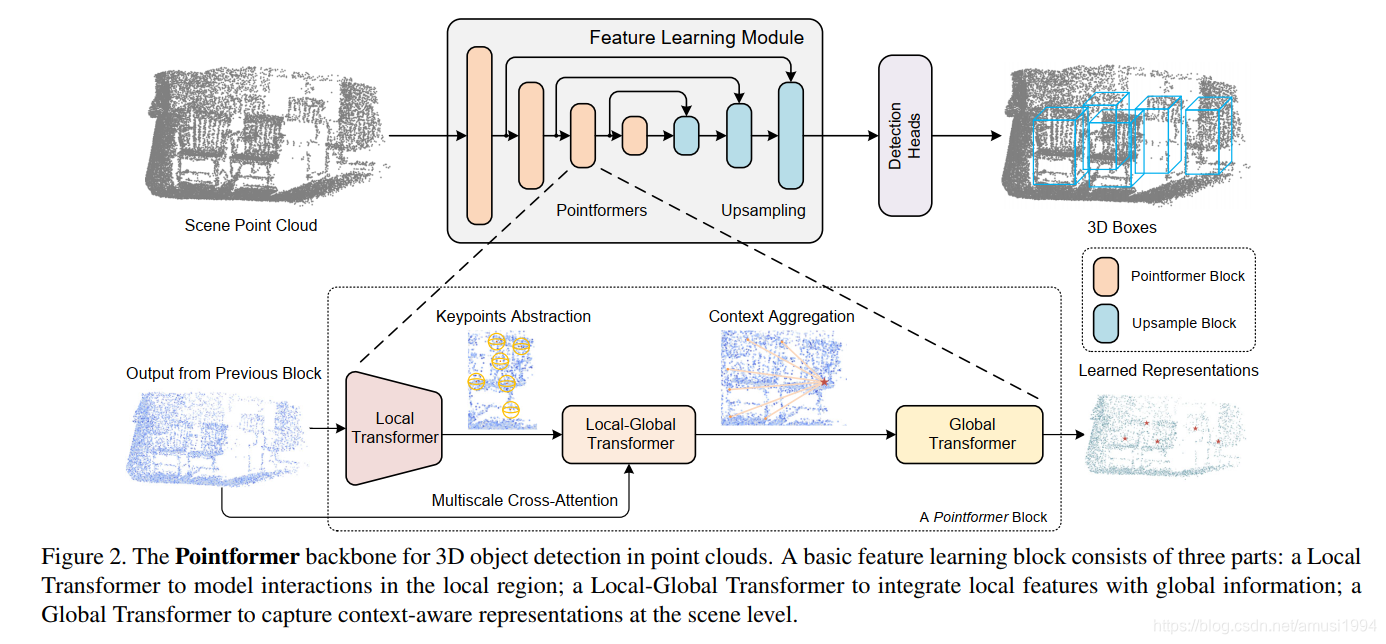
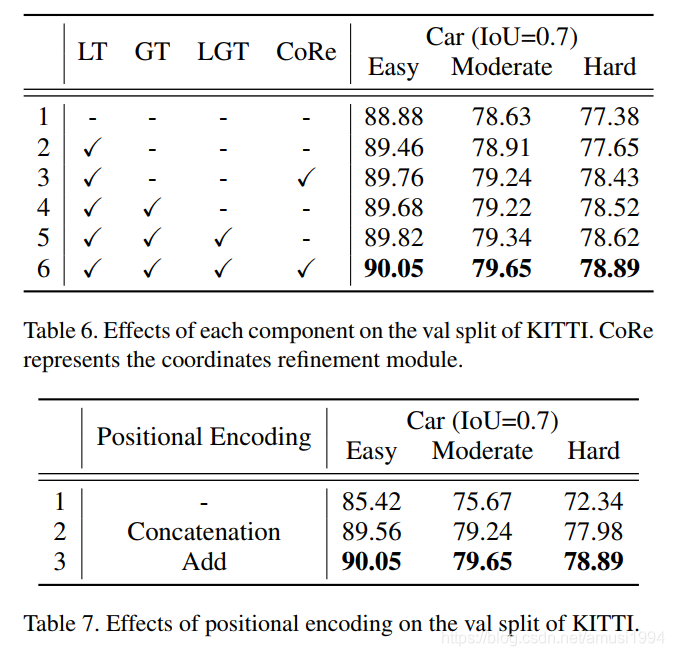
具体而言,采用Local Transformer模块对局部区域中的点之间的交互进行建模,从而在对象级别学习上下文相关的区域特征。Global Transformer旨在学习场景级别的上下文感知表示。
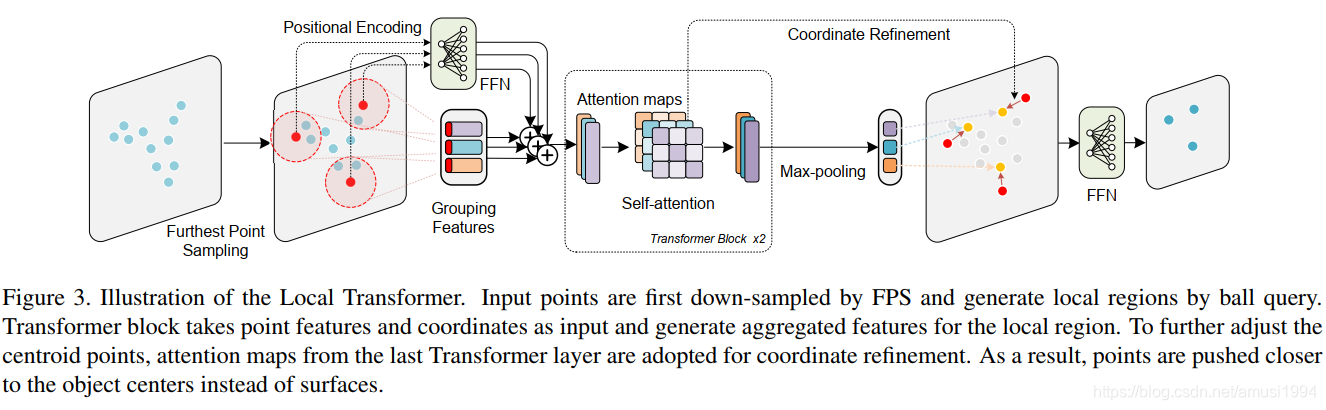
为了进一步捕获多尺度表示之间的依赖关系,我们提出了“Local-Global Transformer”,以将局部特征与高分辨率的全局特征集成在一起。此外,我们引入了一个有效的坐标优化模块,以将向下采样的点移动到更靠近对象质心的位置,从而改善了对象proposal的生成。
Local Transformer
主要贡献:
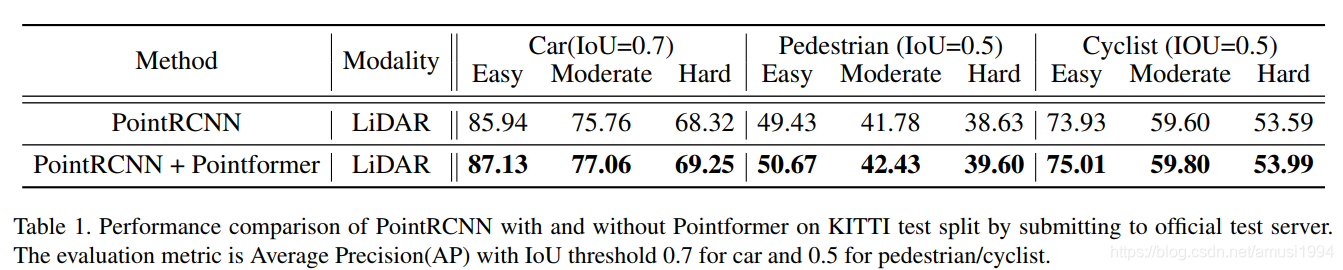
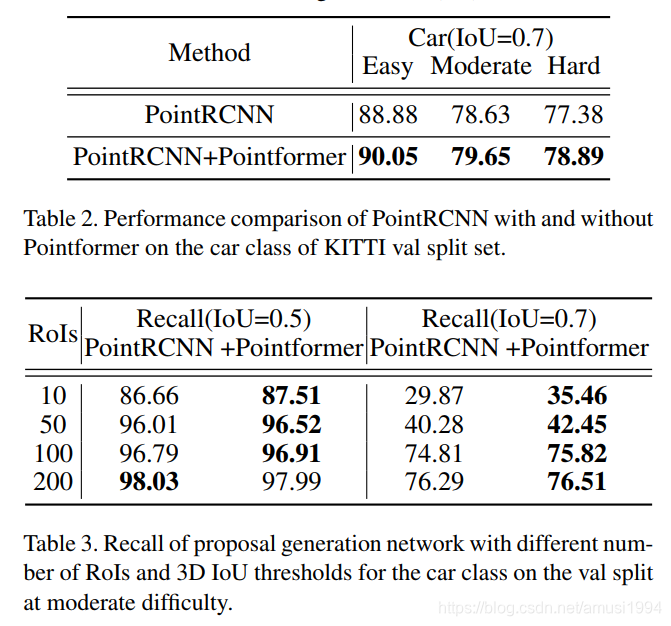
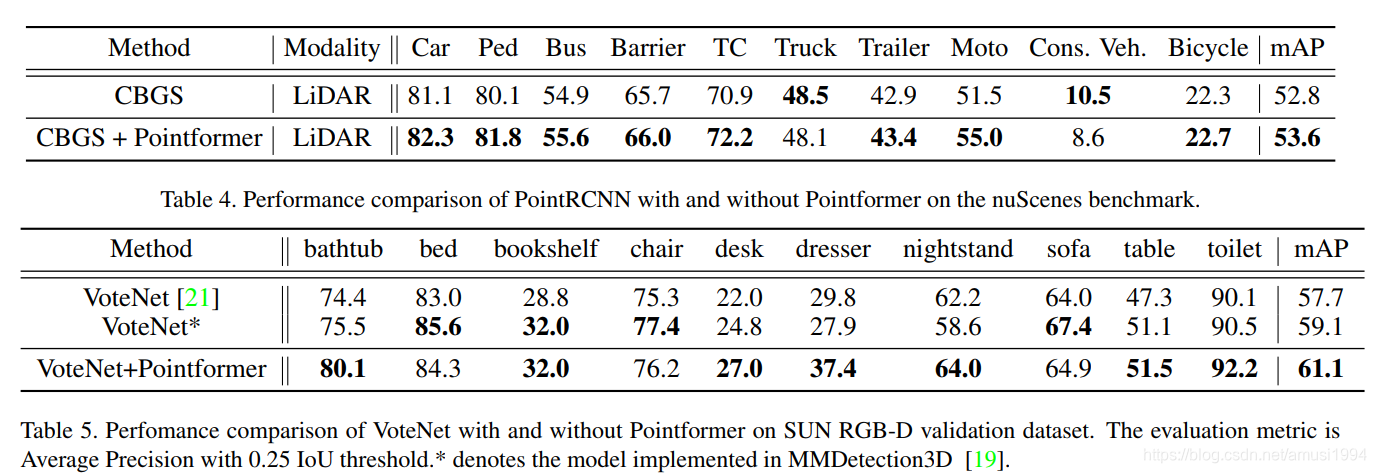
实验结果
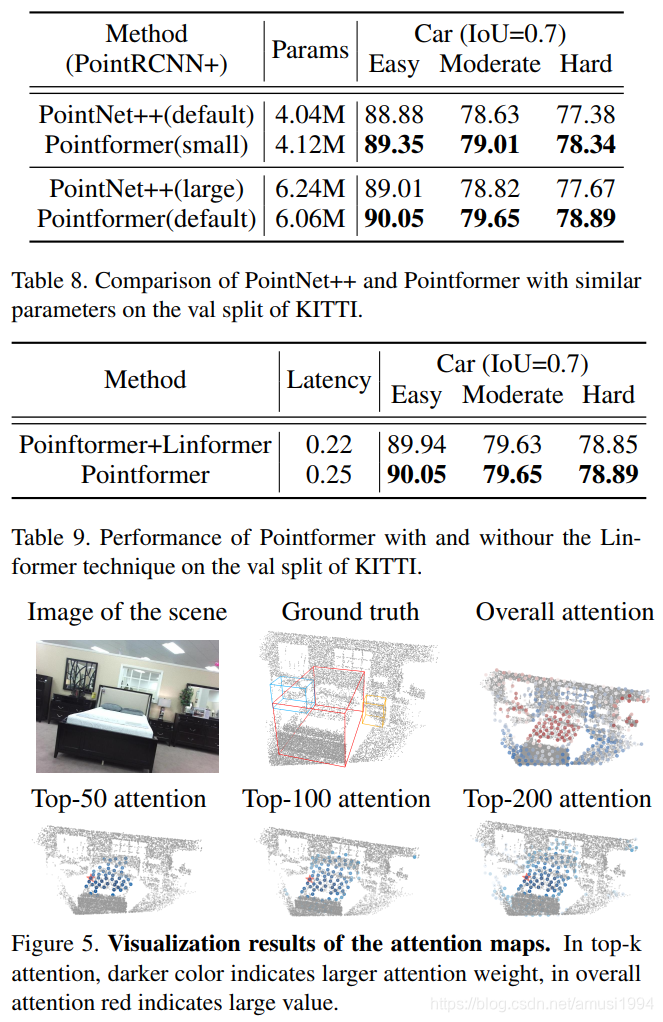
我们将Pointformer用作最新目标检测模型的基础,并在室内和室外数据集上展示了优于原始模型的重大改进。
Transformer交流群
已建立CVer-Transformer微信交流群!想要进Transformer学习交流群的同学,可以直接加微信号:CVer5555。加的时候备注一下:Transformer+学校+昵称,即可。然后就可以拉你进群了。
3D目标检测交流群
建了CVer-目标检测交流群!想要进检测学习交流群的同学,可以直接加微信号:CVer5555。加的时候备注一下:3D目标检测+学校+昵称,即可。然后就可以拉你进群了。
强烈推荐大家关注CVer知乎账号和CVer微信公众号,可以快速了解到最新优质的CV论文。

转载地址:http://kkwsz.baihongyu.com/